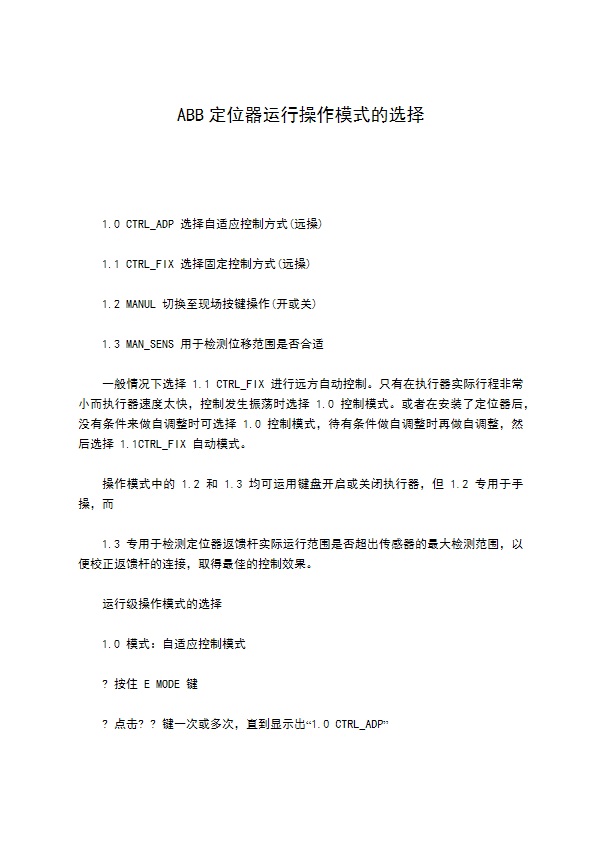
ABB定位器运行操作模式的选择
1.0 CTRL_ADP 选择自适应控制方式(远操)
1.1 CTRL_FIX 选择固定控制方式(远操)
1.2 MANUL 切换至现场按键操作(开或关)
1.3 MAN_SENS 用于检测位移范围是否合适
一般情况下选择 1.1 CTRL_FIX 进行远方自动控制。只有在执行器实际行程非常小而执行器速度太快,控制发生振荡时选择 1.0 控制模式。或者在安装了定位器后,没有条件来做自调整时可选择 1.0 控制模式,待有条件做自调整时再做自调整,然后选择 1.1CTRL_FIX 自动模式。
操作模式中的 1.2 和 1.3 均可运用键盘开启或关闭执行器,但 1.2 专用于手操,而
1.3 专用于检测定位器返馈杆实际运行范围是否超出传感器的最大检测范围,以便校正返馈杆的连接,取得最佳的控制效果。
运行级操作模式的选择
1.0 模式:自适应控制模式
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.0 CTRL_ADP”
? 松开 E MODE 键
? 显示器显示阀位百分数如“50.0% POSITION”
1.1 模式:固定控制模式
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.1 CTRL_FIX”
? 松开 E MODE 键
? 显示器显示阀位百分数如“50.0% POSITION”
1.2 模式:在执行器的实际全行程范围内手动控制
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.2 MANUAL”
? 松开 E MODE 键
? 显示器显示阀位百分数如“50.0% POSITION”
? 使用? ? 或? ? 键进行手动控制。
先按住? ? 键,再按住? ? 键(始终按住? ? 键),执行器将快速开启
1.3 模式:在定位器的检测范围内手动控制
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.3 MAN_SENS”
? 松开 E MODE 键
? 显示器显示返馈杆所处角度位置如“-15.0o SENS_POS”
? 使用? ? 或? ? 键进行手动控制。
先按住? ? 键,再按住? ? 键,执行器将快速开启
定位器的参数配置和修改
参数配置共分 11 组,用 P1._,P2._---P11._(P 为 PARAMETER 首字母) 表示, 而每一组又分若干项,如 P1._ 分 P1.0,P1.1,---P1.4 共 5 项, P2._分 P2.0,P2.1, ----P2.8 共9 项。
有些项中又可分若干分项以供选择,如 P1.0 中可选择 LINEAR 用于直行程执行器,选择 ROTORY 用于角行程执行器。又如 P1.4 EXIT 中可选择 NV_SAVE(Non-V Volatile save)存盘退出或 CANCEL 不存盘退出。
有些项中只有数值以供调整,如分程调节中给定信号为 4—12 mA ,则 P2.0 中的数值应设为 4 mA ,而 P2.1 中的数值应设为 12mA. 如给定信号为 12—20 mA ,则 P2.0 中的数值应设为 12 mA ,而 P2.1 中的数值应设为 20mA.
参数设定举例:将阀门的正作用改为反作用
定位器初始设定适合于正作用阀门,如实际驱动的阀门为反作用型式即阀杆上行关闭阀门,则修改P2.3=Reverse
一般的阀门出厂之前已经修改此参数无需用户再修改,但可以通过下述方法检查。


ABB定位器运行操作模式的选择
1.0 CTRL_ADP 选择自适应控制方式(远操)
1.1 CTRL_FIX 选择固定控制方式(远操)
1.2 MANUL 切换至现场按键操作(开或关)
1.3 MAN_SENS 用于检测位移范围是否合适
一般情况下选择 1.1 CTRL_FIX 进行远方自动控制。只有在执行器实际行程非常小而执行器速度太快,控制发生振荡时选择 1.0 控制模式。或者在安装了定位器后,没有条件来做自调整时可选择 1.0 控制模式,待有条件做自调整时再做自调整,然后选择 1.1CTRL_FIX 自动模式。
操作模式中的 1.2 和 1.3 均可运用键盘开启或关闭执行器,但 1.2 专用于手操,而
1.3 专用于检测定位器返馈杆实际运行范围是否超出传感器的最大检测范围,以便校正返馈杆的连接,取得最佳的控制效果。
运行级操作模式的选择
1.0 模式:自适应控制模式
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.0 CTRL_ADP”
? 松开 E MODE 键
? 显示器显示阀位百分数如“50.0% POSITION”
1.1 模式:固定控制模式
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.1 CTRL_FIX”
? 松开 E MODE 键
? 显示器显示阀位百分数如“50.0% POSITION”
1.2 模式:在执行器的实际全行程范围内手动控制
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.2 MANUAL”
? 松开 E MODE 键
? 显示器显示阀位百分数如“50.0% POSITION”
? 使用? ? 或? ? 键进行手动控制。
先按住? ? 键,再按住? ? 键(始终按住? ? 键),执行器将快速开启
1.3 模式:在定位器的检测范围内手动控制
? 按住 E MODE 键
? 点击? ? 键一次或多次,直到显示出“1.3 MAN_SENS”
? 松开 E MODE 键
? 显示器显示返馈杆所处角度位置如“-15.0o SENS_POS”
? 使用? ? 或? ? 键进行手动控制。
先按住? ? 键,再按住? ? 键,执行器将快速开启
定位器的参数配置和修改
参数配置共分 11 组,用 P1._,P2._---P11._(P 为 PARAMETER 首字母) 表示, 而每一组又分若干项,如 P1._ 分 P1.0,P1.1,---P1.4 共 5 项, P2._分 P2.0,P2.1, ----P2.8 共9 项。
有些项中又可分若干分项以供选择,如 P1.0 中可选择 LINEAR 用于直行程执行器,选择 ROTORY 用于角行程执行器。又如 P1.4 EXIT 中可选择 NV_SAVE(Non-V Volatile save)存盘退出或 CANCEL 不存盘退出。
有些项中只有数值以供调整,如分程调节中给定信号为 4—12 mA ,则 P2.0 中的数值应设为 4 mA ,而 P2.1 中的数值应设为 12mA. 如给定信号为 12—20 mA ,则 P2.0 中的数值应设为 12 mA ,而 P2.1 中的数值应设为 20mA.
参数设定举例:将阀门的正作用改为反作用
定位器初始设定适合于正作用阀门,如实际驱动的阀门为反作用型式即阀杆上行关闭阀门,则修改P2.3=Reverse
一般的阀门出厂之前已经修改此参数无需用户再修改,但可以通过下述方法检查。

微信扫一扫在手机阅读、分享本文
本文标题:ABB定位器运行操作模式的选择
链接地址:https://www.hetongbase.com//index/article/detail/detail_id/94826.html
版权声明
该文档由用户投稿上传,不允许他人进行二次传播,一经发现收回会员权益,如果侵权请联系网站客服进行处理。

微信订阅号

联系客服
